You’re walking along a beautiful beach when your senses are suddenly marred by cigarette butts just lying along the sand. Anyone who has ever visited the beach has probably had that experience as these are among the most common trash we see lying around. Using humans to clean it up is of course the most practical but it can be a tedious and slow process.
Designer: Dynamic Legged Systems at the Italian Institute of Technology


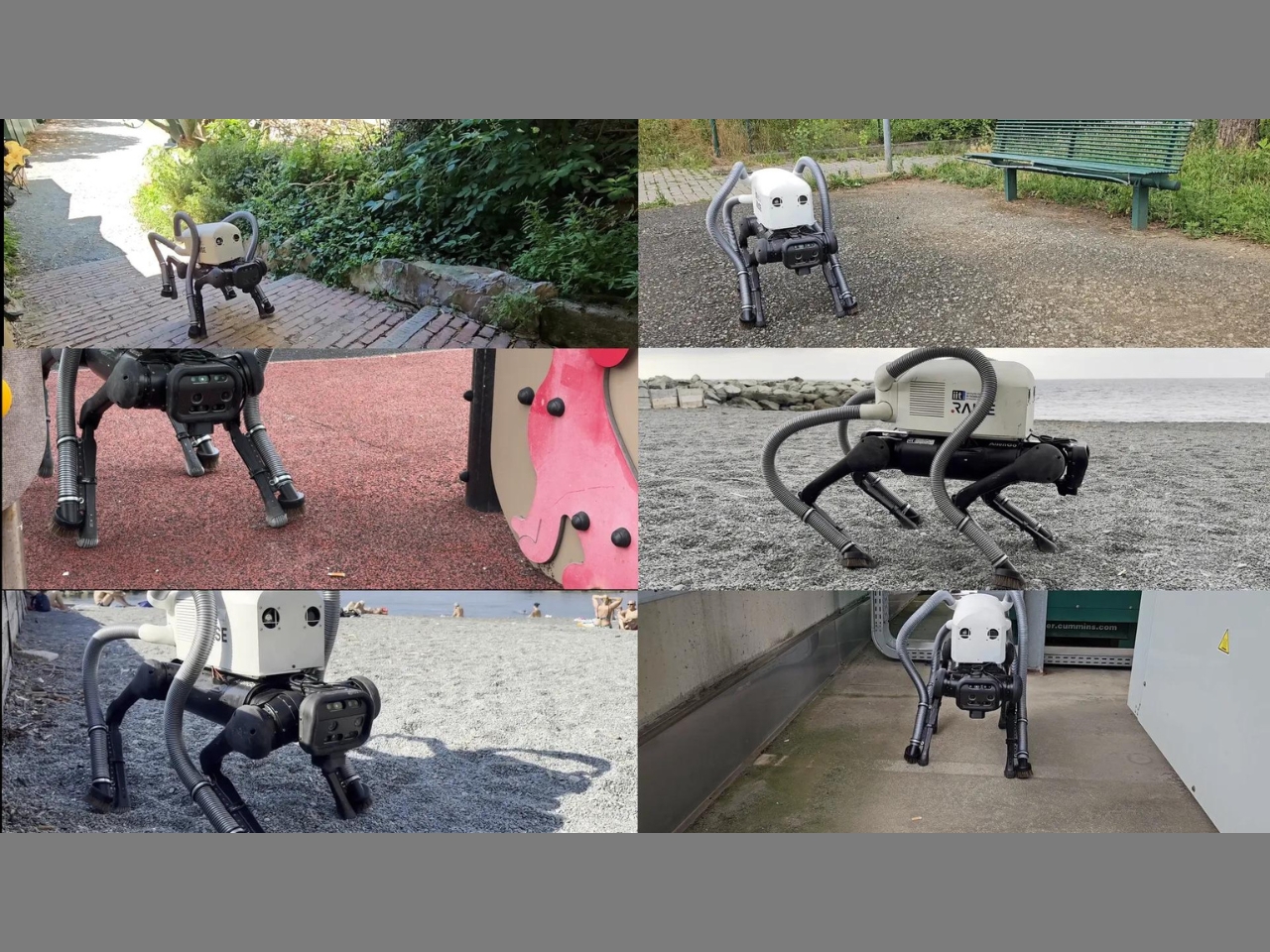
In this age of robotics, we can of course get them to clean this up. VERO or Vacuum-cleaner Equipped Robot is one such device that has been developed for this very purpose. It is a dog-like quadruped robot that uses vacuum nozzles on its feet and is equipped with depth cameras and uses a neural network. It is based around the the AlienGo robot from Unitree.

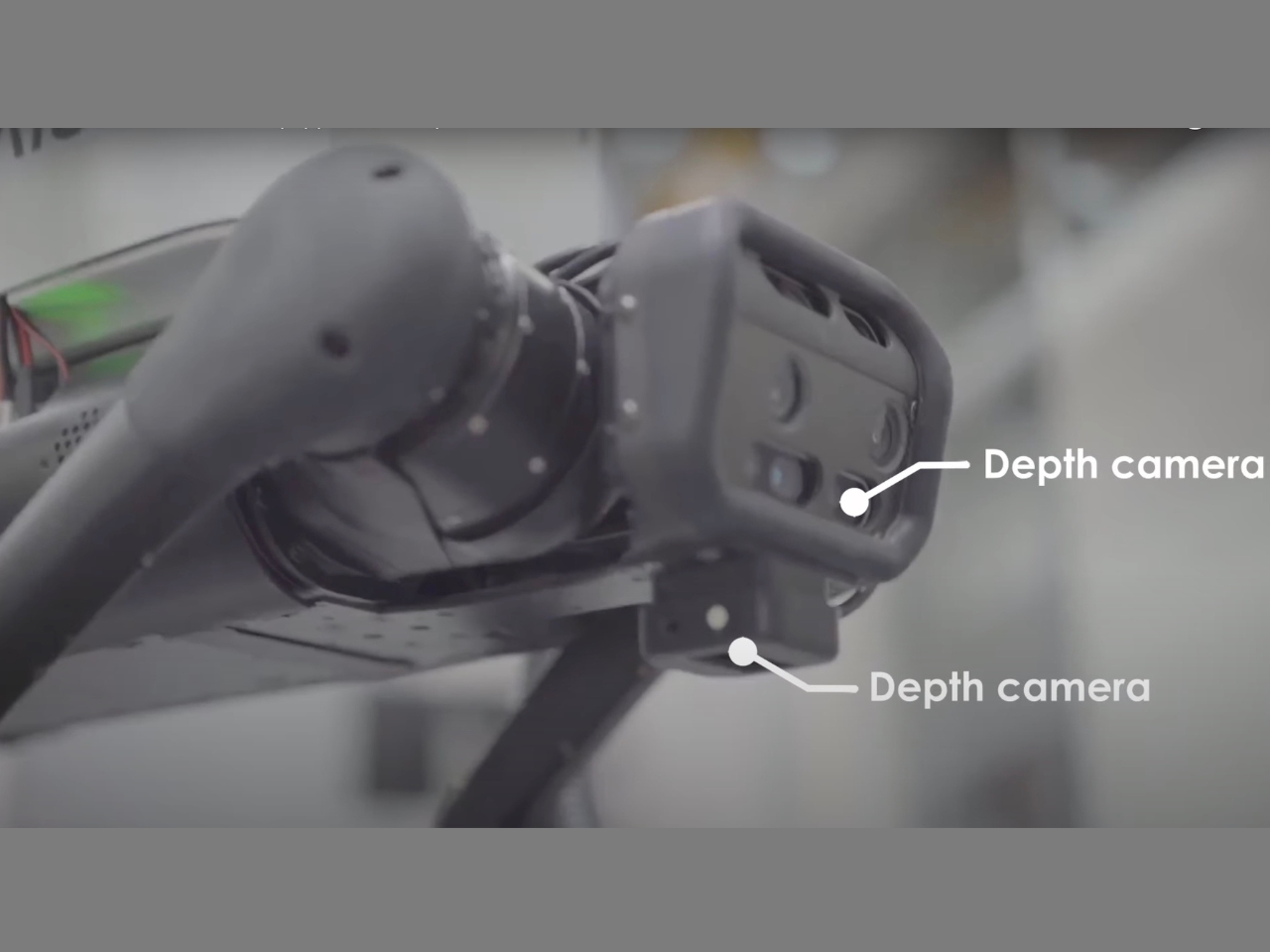
The vacuum is mounted on the back of the robot with hoses going down the legs and with 3D-printed nozzles that can suck the butts as near the ground as possible without the robot toppling over. It is able to use the depth camera mounted on the robot’s chin and the neural network to not only detect the butts but also to chart a path towards and around it.


The VERO is tested not just on sand but also on stairs and uneven surfaces in Genova where the lab is located. It is not that quick yet but is still better than humans manually picking up butts since the latter will eventually get tired and fed up. There may be other potential use cases for a robot like this like inspecting cracks in buildings and bridges, placing nails and rivets, and even spraying weeds in crop fields.